

1. Introduction of the study
ARM (“Aron RISC Machine”) is an active architecture for computer processors and belongs in a RISC (“Reduced Instruction Set Computing”) family. Besides, ARM includes several features like “store and load based architecture”, “16×32 bit register file”, and “single cycle instruction execution”. DSP stands for “Digital signal processing“, and that is really useful for managing several audio and informational signals with proper bandwidth and managing to provide the best graph for the nature of this particular signal. The study is mainly focused on advanced ARM, and DSP technology and simulation is managed through programming languages like Matlab simulation for identifying better graphs and signals as output. In order to manage “Shanon Speech” as an output, “vocoder” is performed with the help of Matlab, and this specific study aims to meet this analysis of vocoder. The advanced ARM and technology of DSP can provide better and effective signal processing, and this technique is essential to manage cost and resources to implement two processors in a single system. Thus, developing and implementing “Shannon Speech” with the help of “vocoder” in Matlab can be managed by applying ARM as an advanced DSP in this study.
2. Part A:
2.1 Principle design analysis and along with appropriate source code
In this regard of managing architectural analysis and principle design, the output of the signal is varied with the audio signal with the changes of range and frequencies. The speech software, in this case, is given 0-11 Khz, and that is measured within the bandwidth of this particular audio signal, and that has the sampling rate of 22.05 kHz with the bits of 16. Added to this, total channels, in this case, are approximately varied from 1 to 24 on the respect of user-defined. In order to identify the best filter utilisation in this case, “III filter” is used to manage “Shannon principles“, and this stands for “Infinite Impulse response“, and that is also considered as “3rd order elliptic IIR filter”. It is a sequential filter application, and that totally depends on the previous output and result as well as measuring present input to provide better results in the next. Additionally, this recursive filter has the application in case of a “vocoder” program to analyse the special audio signal in an active way.
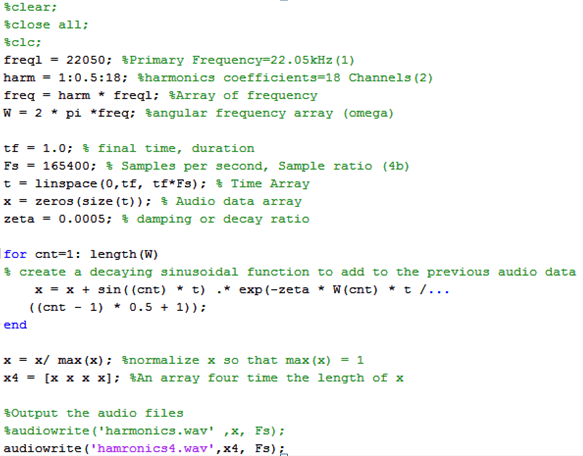
Figure 1: Source code for Audio file by using “vocoder”
All the selected bandwidth, in this case, can be considered by the developers and designing of “vocoder” speech can be a more practical option to meet the exact filtering system in “Shannon filter”. An interval is considered within 0 to 35, and that is really measurable on the basis of input signal strength and frequency in a particular manner. For managing human audible signals in this case, five divisions are considered and that are indicating 0, 8.75, 17.5, 25.5, and 35 and that are denoted as “m”, and it indicates a cut off frequency in this particular manner. This is applicable for “f= 165.4 (10^0.06m – 1)”, and cut off frequency is helpful to getting this particular bandwidth in several divisions. In the implementation of cut off frequency of “vocoder speech”, LPF (“low pass filter”) is involved with the Matlab program development to manage the design of differnrt signal. After that, all these signals are measured through multiplying signals, and that is to be “White noise” and outcome from the filter specification in this regard.
2.2 Analysis of using FFT and its proper rectification process
Figure 2: Overview of FFT
(Source: As influenced by Takenaka et al. 2020)
FFT is a promising attribute in DSP and stands for “Fast Fourier Transform”, and that is used to create effects within static images and sharpen edges along with sine waves and different graphs in this regard. DFT (“Discrete Fourier Transform”) is considered one of the practical applications of signalling transform, and that is basically simulated for providing audio signals as well as different transformations of signalling processes (Takenaka et al. 2020). FFT helps to manage the transformation of the domain from time to frequency, and the reverse process is also indicating the best DFT management of signal processing. In the case of the communication field, this particular FFT process dealt with various signalling systems and their different frequency bands (Costa, 2018). FFT is mainly performed on the basis of two major principles, and these are “Discrete convolution FFT” and “Continuous convolution FFT”.
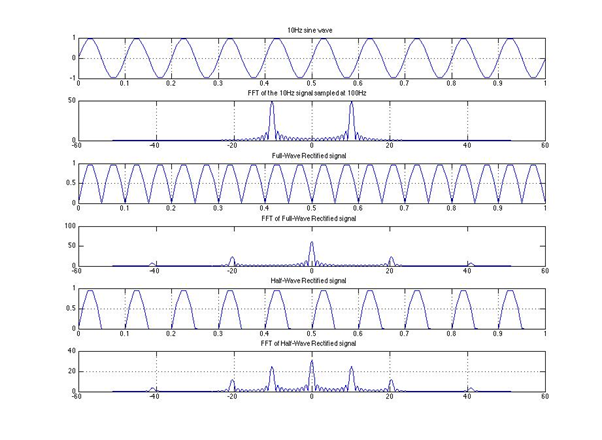
Figure 3: Rectification of sine wave for FFT
(Source: Rahnama et al. 2018)
In the case of “vocoder speech“, FFT is used to improve LPF, and its time synthesising must be evaluated by this process of a major signal. As a result, an “additive synthesis” can be observed in the case of digital audio music (Rahnama et al. 2018). Additionally, for the rectification purpose of FFT, the clipper circuit is measured with special criteria, and that is fully based on the clipping process to neglect the negative and positive end of the signal. This indicates the better conversion of AC to DC signalling process and managing full clipping process with an example for an audio signal.
2.3 Explanation of spectrum analysis
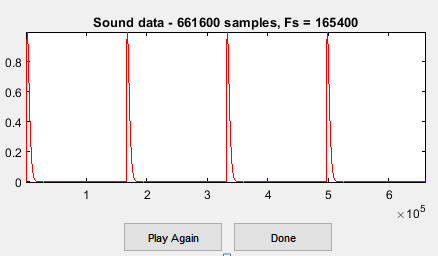
Figure 4: Output signal as a spectrum
Spectrum is an invisible radio frequency that can travel as a wireless signal and enable it to manage mobile calls and every single task on the internet. All electromagnetic spectrum is very common in everyday’s life to manage wireless signals and large scale frequencies within the communication process (Su et al. 2018).
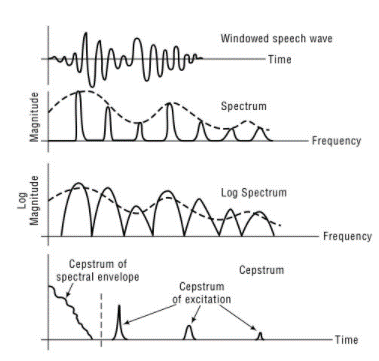
Figure 5: Vocoder spectral synthesis
(Source: As influenced by El Boghdady et al. 2021)
On the other hand, it’s considered as various colours that have different wavelengths and manage to set effective values to operate various intensities of light. A Rainbow can be a good example to understand the concept of the spectrum, and an output of an audio signal is a spectrum of 16 bits and that can be measured through a sinusoidal signal as an input wave. In the case of “vocoder speech”, the output of the signal can be produced through an audio signal, and every beat of this signal can be audible to humans (El Boghdady et al. 2021). The figure indicates that two signals are observed like a sine wave in input, and for output, it is an exponential waveform.
2.4 Effectiveness of “vocoder” with proper music and its analysis
“Vocoder” the term implies voice encoder, and that is useful to reduce the bandwidth of signal and information for allowing the signal and transferring it for large distances. In Bell Labs, 1938, Dudley invented “vocoder”, and that meant “synthesising human speech“. The part of the decoder within this system is also referred to as “voder”, and that is used as independent speech synthesis (Ganis et al. 2021). It transfers and analyses the sonic character in the audio signal to arrive at the input for better synthesising of sound generators. Effective varieties are observed in the case of Voice encoder, and these are “cestrum vocoders”, “voice-excited vocoders”, “Formant vocoder”, and “channel vocoders”. Within an unstable networking system, “vocoder” helps to manage a secure transmission of an audio file, and this is able to encrypt the spectral contents for changing music dynamically (Abro et al. 2019).
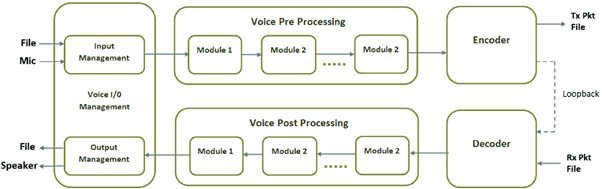
Figure 6: “vocoder” block diagram
(Source: Cardozo et al. 2018)
In the control of voice transmission signal and its proper synthesis with audio signalling processes, the best example of “vocoder” is “Hide and Seek by Imogen Heap”. All security purposes and communication within audio-based signals can be maintained through this “Voice encoder” (Cardozo et al. 2018). In order to manage secure communication in radio frequency, traditional usages of vocoder can be observed, and that is manager characteristics of an audio signal. The waveform of an input signal is added with different characteristic signals and provides an audio signal output as a musical range that is measured by the audible of humans hearing range.
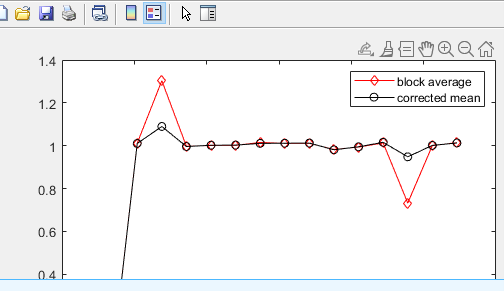
Figure 7: Noise signal in the “vocoder speech”
This waveform is developed in Matlab software, and that indicates two major factors like corrected and block average. In this case, N= 10 in the coding source, and that is helping to manage the noise within the output of this waveform and length of this waveform is particularly maintained through the plot as “(1: N+2: length(aver)*(N+2))”. In the case of communication and wireless communication systems, Gaussian Noise can be considered in signal and waveform properly.
3. Part B: Designing of filters
(1) Designing of FIR LPF (Low pass filter):
An FIR (Finite Impulse Response) LPF is a structure that is used to manage its implementation digitally as a sort of frequency. Through using multipliers, delays, addresses can help to create an implementation of FIR LPF (Sudharsan, R.R. and Deny, 2020). In the case of a low frequency that is smaller than the cut, off frequency is managed by FIR LPF, and its attenuation is really higher than the cut-off.
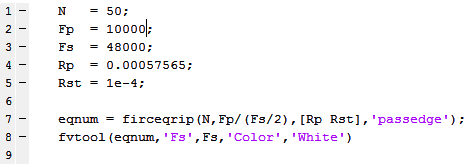
Figure 8: Designing of FIR LPF
All measurements are set about the questions given in the study material, and various factors in this regard are considered with effective values (Chen et al. 2020). These are given in the Matlab programming language as input to provide a spectrum from this process. For managing magnitude variables, N, Rp, Fs, Rst, and Fp are considered.
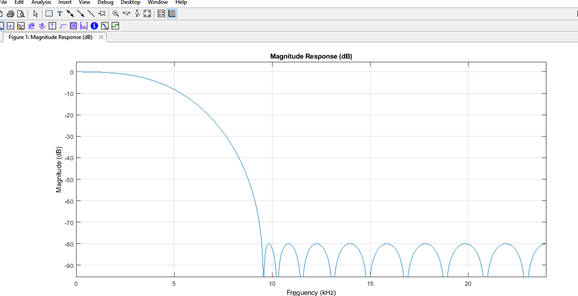
Figure 9: Response with proper values given in this material
It is measured with N=20, Fs= 48000, and Fp=300, and these indicate an exponential decay in this signal before 10KHz and a full cycle is completed in between 10KHz, and 15KHz and magnitude are 0 as the response of frequency is 0 kHz. The magnitude response is measured in dB (Decibel) (Al-Ani, 2017).
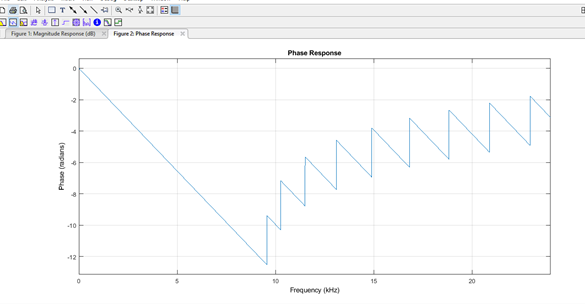
Figure 10: Phase response with the given values
This figure indicates the phase response with the same input in this process, and all the phases are measured in radius, and which is more reliable for identifying exact curvature and its delaying on the basis of frequency. Same input is given like N=20, Fp= 300, and Fs= 48000.
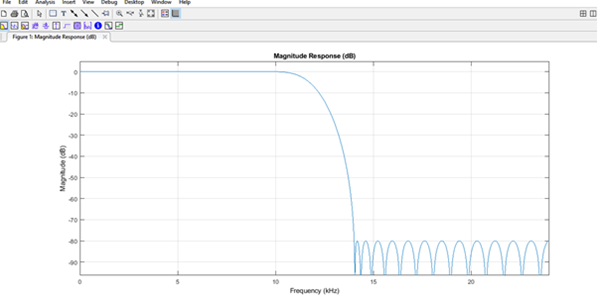
Figure 11: Response by changing values
N is changed from 20 to 50, and Fp is changed from 300 to 10000 and that gives a spectral change in magnitude as well as phase response. This particular figure 11 indicates magnitude response, and that is measured in dB (Tham et al. 2021).
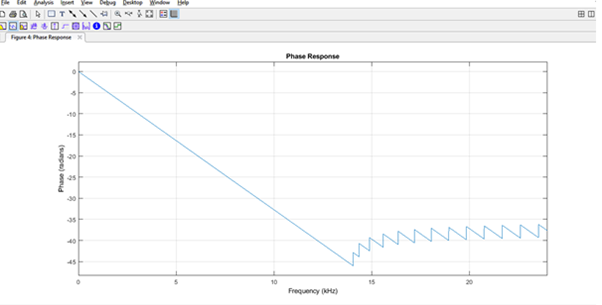
Figure 12: Phase response after changing values
This figure indicates the phase difference in changing of N and Fp that are met between 10 kHz and 15 kHz. A straight delay is observed in that form of managing phase response.
(2) Designing of FIR HPF (High pass Filter):
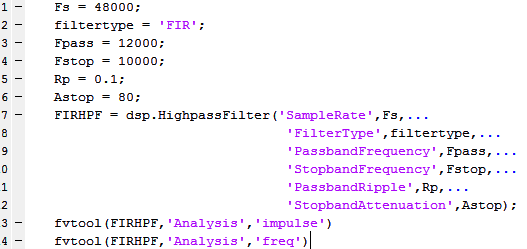
Figure 13: Source code for FIR HPF
For getting an output of HPF in the case of FIR, different values are considered according to study material, and these are Fs= 48000, Rp=0.1, Fstop= 10000, and Fpass=12000, and Astop= 80.
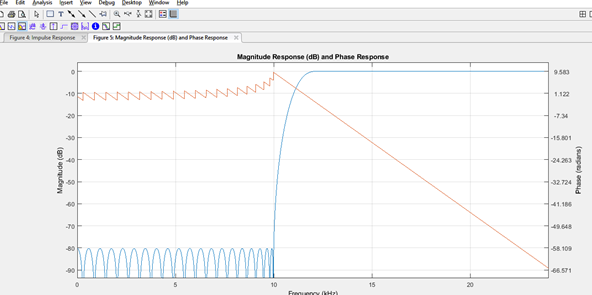
Figure 14: the response of phase and magnitude by using given values
This indicates an exponential rising, as well as straight decaying, are observed and according to the magnitude of the value, and phase response is cutting in a point that is in between 10 kHz and 15 kHz, and that is really effective for phases and magnitude of these signals (Ciulla et al. 2018).
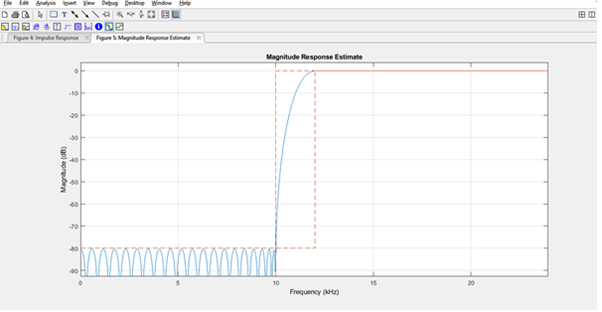
Figure 15: Estimation of the magnitude response
The estimation is measured on the basis of Fstop, Astop, and Fpass, and due to HPF, it is easily seen that the magnitude is rising between 10 kHz and 15 kHz and that it touches the point in 0 dB. Proper estimation is noticed under the Magnitude response with active HPF in Finite impulse response (Yousif et al. 2018).
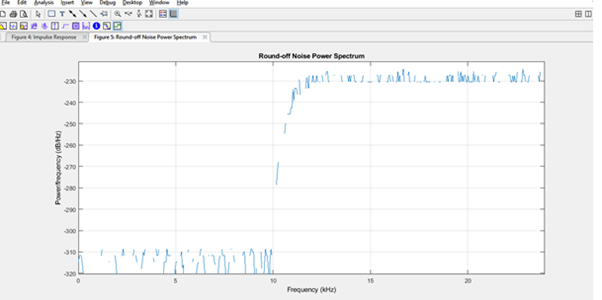
Figure 16: Power spectrum of “Round off Noise”
The roundoff noise indicates an error between the power and frequency domain, and that involves magnitude estimation. The frequency is varied with the Fstop and Fpass, and for using HPF, the rising of a signal is properly seen in this process. All values are set to the same input like Fpass=12000, Rp=0.1, Fs= 48000, Astop= 80, and Fstop= 10000.
(3) Designing of FIR BPF (Bandpass filter):
The importance of FIR BPF is to allow filtration of waves lying within an area to pass the signal and resist all other waves to pass within it.
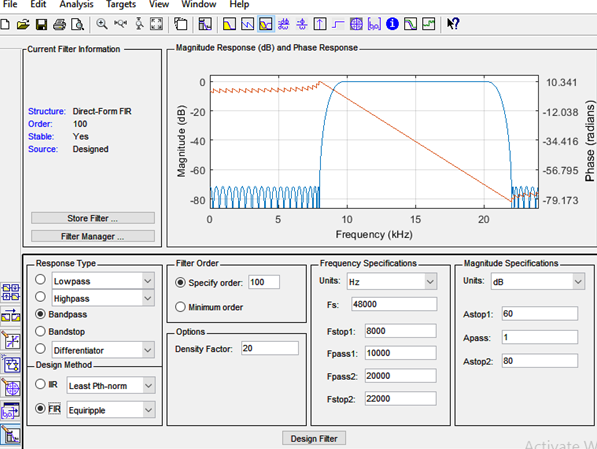
Figure 17: Designing of BPF with selective values in this process
All the values are set in a particular way, like Fstop1= 8000, Fstop2= 22000, Fpass1= 10000, and Fpass2= 20000, along with different values of Astop1 and Astop2, as well as Apass. For designing the BPF in respect of this value, the phase and magnitude spectrum is noticed in this figure, and that is particularly dependent on the fixed value of “density factor” 20 (Mincey et al. 2018).
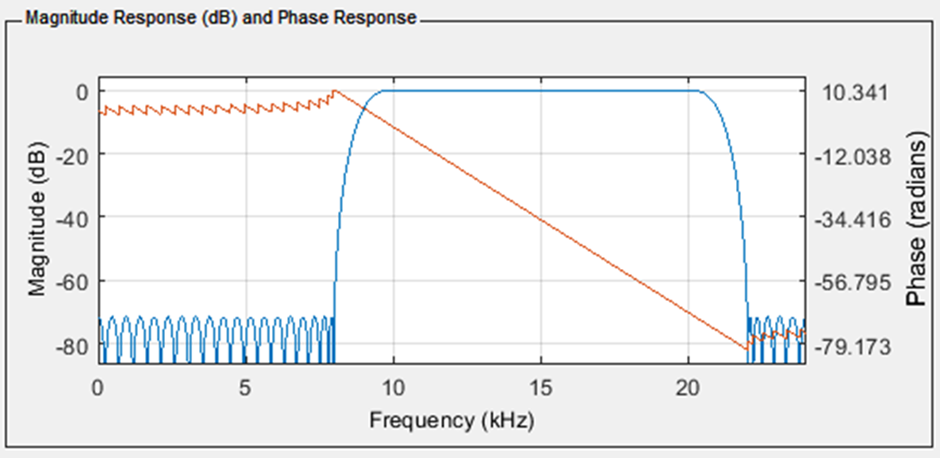
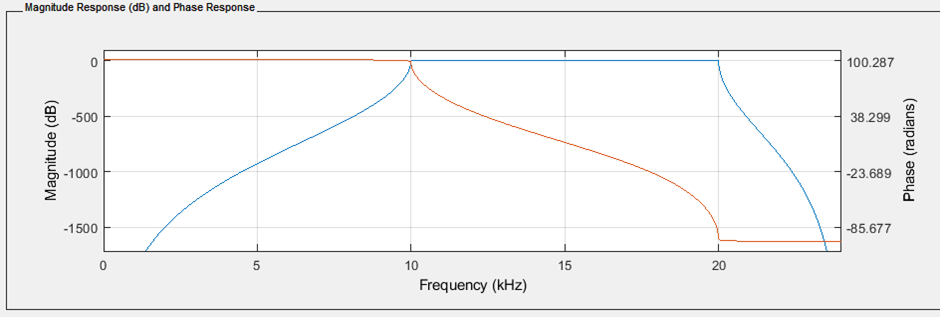
Figure 18: Response of phase and magnitude by selecting the values
The magnitude and phase response is cut in two points, and these are between 5kHz and 10 kHz, as well as 20 kHz and 25 kHz. On the basis of phase, these points are in between 10.341 radius and -12.038 radius as well as near the -79.173 radius. In practice, the negative sign indicates the opposite side of the signal and rotates the inverse of magnitude response. After that, it operates in three dimensions like frequency, phase, and magnitude (Pertiwi and Agoes, 2017).
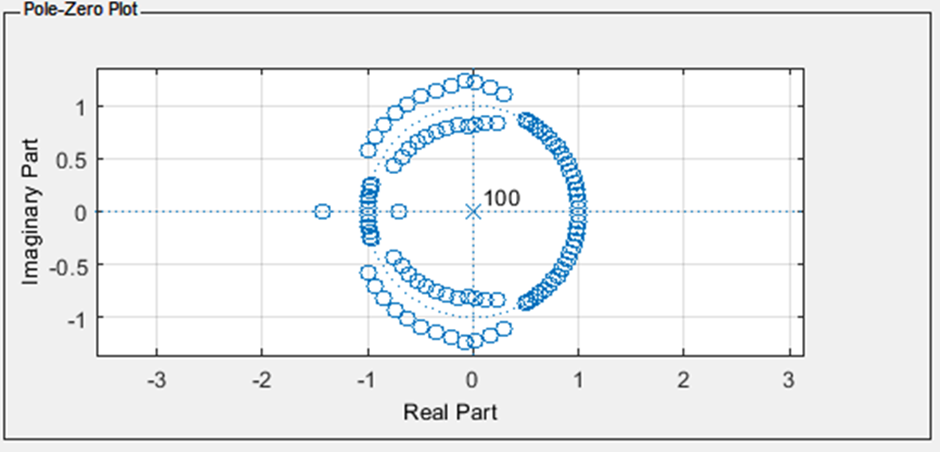
Figure 19: A “Pole zero plot” in case of FIR BPF
Two axes denote two separate activities like the imaginary part, and real part and a major portion is present in between -1 and -2. The cutting point is in 100.
(4) Designing of FIR BSF:
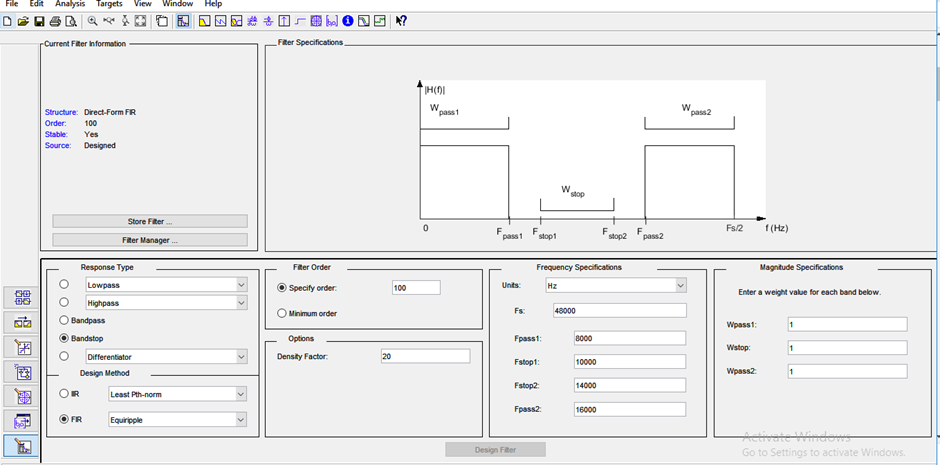
Figure 20: Designing of FIR Bandstop filter
In this study model, phase response and frequency have been generated, Fpass 1 has been set to 8000, Fstop 1 has been set to 10000,f pass 2 has been set to16000, and f stop 2 has been set to 14000.
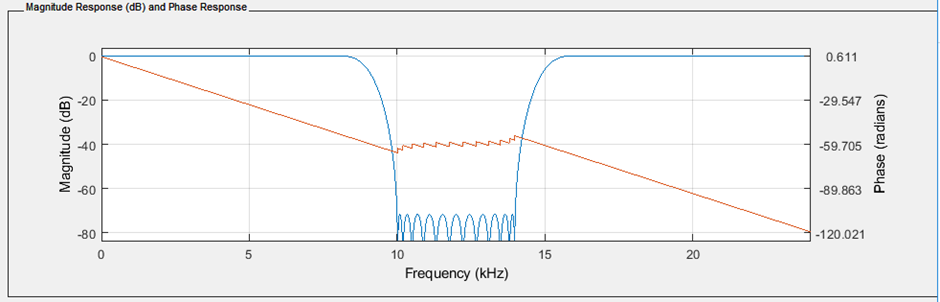
Figure 21: responses of frequency and phase on the respect of BSF
It has been seen in the above figure that the frequency response and phase have been figured out through the graph, where the graph has been plotted between the magnitude and the frequency. Along with the filter design prompt, three domains, including frequency, magnitude and phase, are included (Meenaakshi Sundhari and Deepa, 2019). Besides, the frequencies above and below corresponding to the wl to wu have been passed through the filter. In such accordance, in the case of a band-stop filter, frequencies that range from wavelength will be stopped.
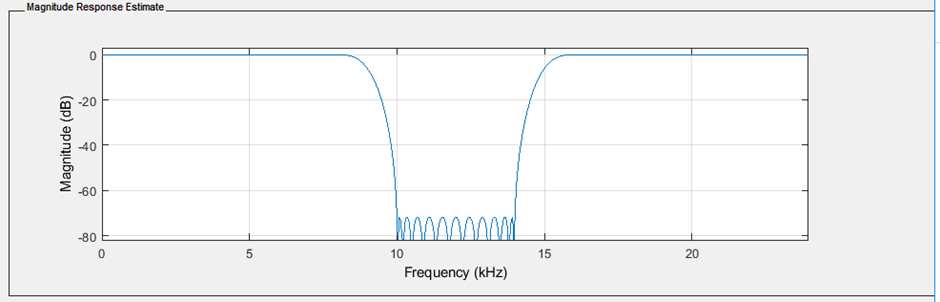
Figure 22: Estimation of magnitude response for BSF
As per the design of the filter, there are several kinds of variables, including f pass 1, f pass 2, f stop 1, f stop 2 and N. Along with that, density factors vary, where the range is 20 to 30. In such accordance, negligible charges have been noticed, where it can incur to 100 or the maximum value.
(5) Designing of IIR BPF along with N=100:
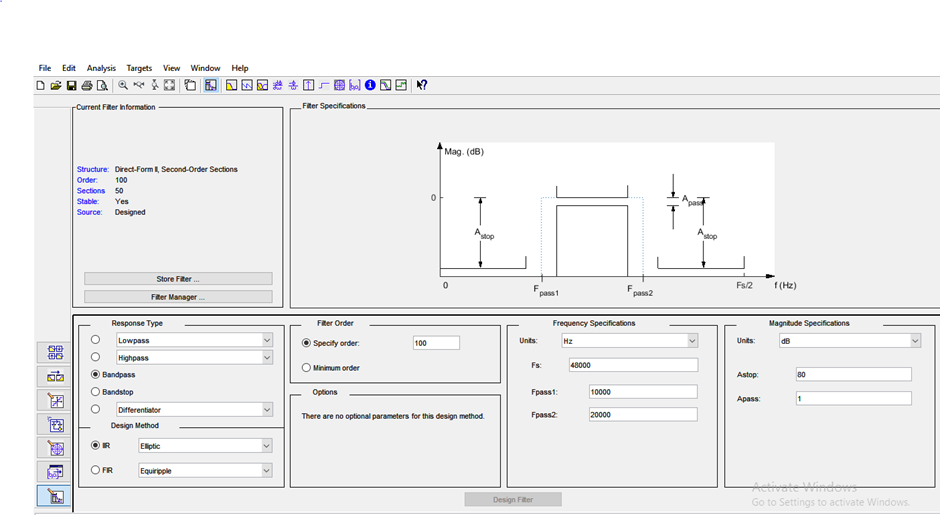
Figure 23: Designing of IIR BPF in N=100
From the above figure, it has been seen that the IIR filter can be encapsulated as a recursive filter, where the filter is computed for the generation of the output. In such accordance, a current is used as an input and precisely is used as the output (Sutradhar et al. 2017). Moreover, the IIR bandpass has a difference from the FIR bandpass filter.
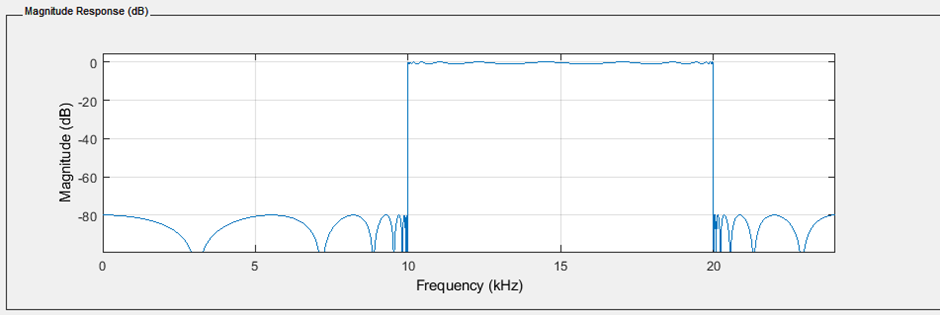
Figure 24: response of magnitude in case of IIR filter
The above FIR bandpass filter has been developed where various inputs, including Fpaas 1, N and Fs, has been provided. Along with that, The values of several variables are N=100, Fpaas 1=10000, F pass 2=20000 and Fs-48000.
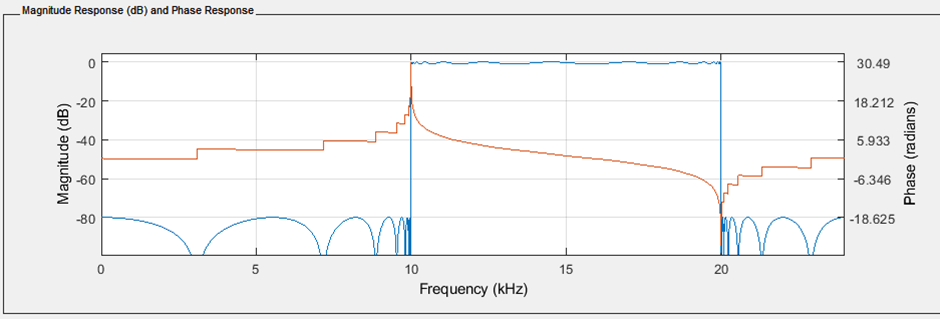
Figure 25: Phase and magnitude response of IIR BPF
In the case of the IIR BPF, in order to get the magnitude and phase response, magnitude and phase response are combined where the magnitude, phase and frequency domain are created. In such accordance, during the design, “FIR BPF” has been considered blended with the specification.
(6) Designing of IIR BPF at N=130:
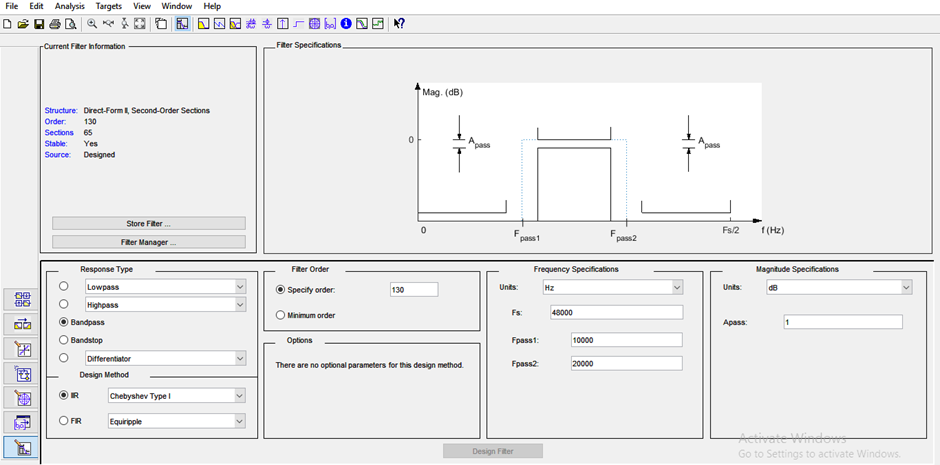
Figure 26: Designing of IIR BPF at N=130
The order is changed from 100 to 130, and all the signals respond differently in the case of BPF. A clipper technique is added for managing the proper access of this process.
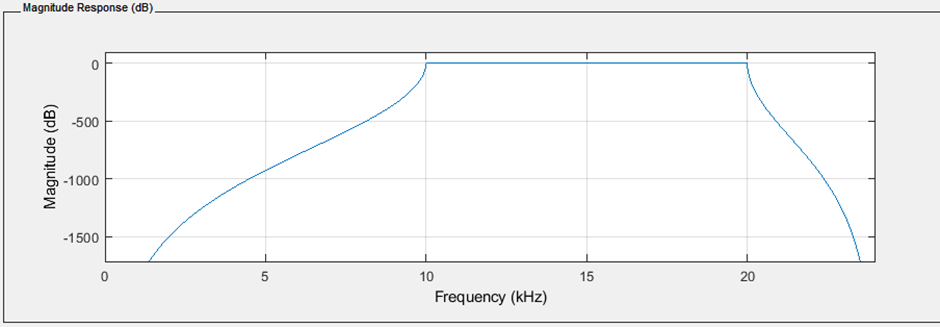
Figure 27: Magnitude response in N=130
In this particular figure, IIR BPF has been performed differently on the basis of frequency and phase response. This particular magnitude spectrum is developed on the basis of N=130.
(7) Difference designing of IIR filter for the different values of N:
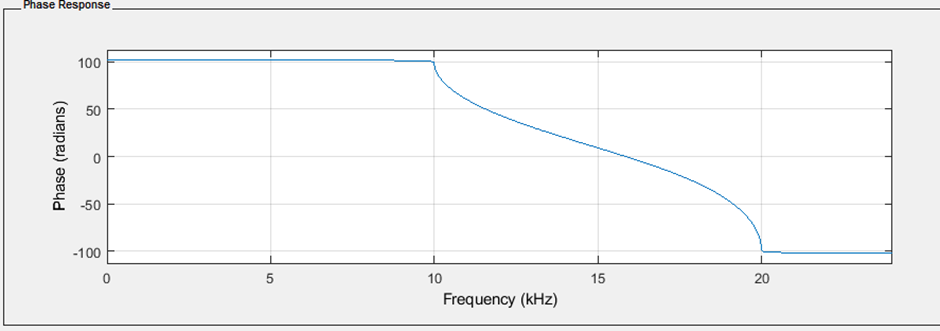
Figure 28: response of phase for N=100
Now the order is fixed in 100, and all the parameters remain the same as the previous value. The curve in this diagram indicates a big fluctuation within 10KHz to 20 kHz.
Figure 29: responses of phase and magnitude with frequency
Both the phase and magnitude response are operating with the help of frequency. In 10KHz, two responses are met together and then divided to this stage.
(8) Comparison of different IIR Filters on the basis of cost and efficiency:
The IIR filter uses previous input and output values for generating present output, and a sequential aspect is observed in this regard. This indicates FIR filters are more efficient in the comparison of IIR filters. Based on the above explanation, the FIR filter is more efficient than the IIR because the FIR filter is much more stable than the IIR filter. A linear phase and feedback circuit are maintained by the FIR filter (Meenaakshi Sundhari and Deepa, 2019). As a result, it makes FIR filters superior over the IIR filters. Recursive behaviour is also maintained by IIR filters. The FIR filter is much more stable than the IIR filter because the current output has nothing to do with the previous output.
(9) Designing of Elliptical LPF Filter:

Figure 30: Designing of Elliptical Low pass filter
A ripple behaviour is observed on the basis of passband and bandpass filters. Thi design is set to N=20, Fs= 48000, and Fpass= 1000 for generating better phase and magnitude response.
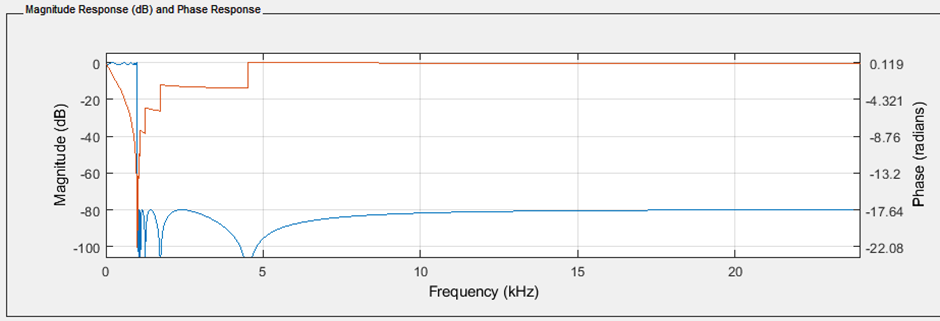
Figure 31: In the presence of N=20, the response of magnitude and phase
The magnitude response indicates the touchpoint is in -17.64 radius and phase touching in 0.119 radius form ), the magnitude response is started operating in this particular manner.
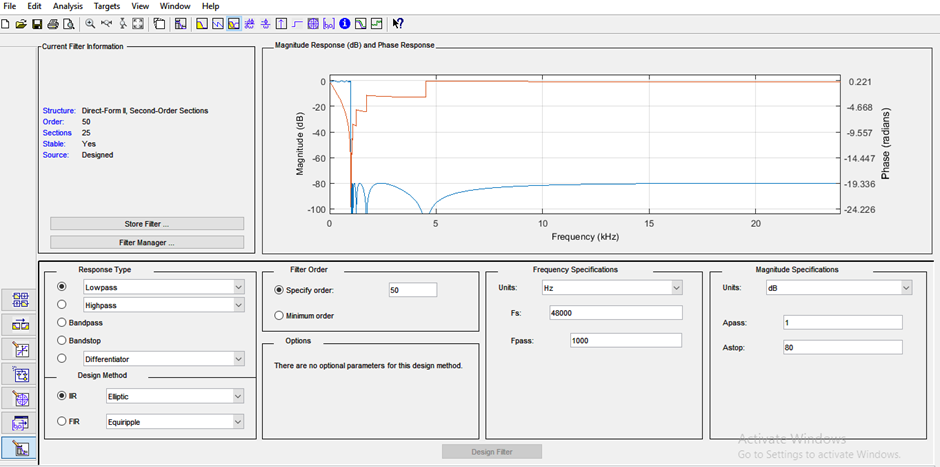
Figure 32: Response of phase and magnitude at N= 50
The order is shifted from 20 to 50, and the responses are changed according to this process. The magnitude response is touching in -19.336, and the phase response touches in 0.221.
4. Conclusion
In such Circumstances, Matlab has been used for performing the study research. Furthermore, the Matlab simulation has been designed with various equipment in order to build the graphs were frequency, magnitude, phase. ARM (“Aron RISC Machine”) is an effective architecture corresponding to computer processors. Along with that, it belongs in a RISC (“Reduced Instruction Set Computing”) family. On the other hand, several features such as “store and load based architecture”, “16×32 bit register file”, and “single cycle instruction execution” are included in ARM. Besides, digital signal processing has been encapsulated in order to conduct the study research.